
�����������a(ch��n)����Ӗ(x��n)�ҽ��O(sh��)����
һ�� �Ŀ���O(sh��)����
(һ) ���O(sh��)Ŀ��
���Ŀ���O(sh��)�����Կ͑���(y��ng)��������l(f��)�����@“���I(y��)4.0”��“�Ї�����2025”�M���Ŀ�O(sh��)Ӌ���Y(ji��)�Ϲ��I(y��)��(li��n)�W(w��ng)���������졢���I(y��)�C���ˡ���(sh��)�ؼӹ����Ԅәz�y��̓�M���桢�Ԅӻ�����……�����P(gu��n)��(y��ng)�á��o�ܽY(ji��)��“��(li��n)�W(w��ng)+���̌��`�̌W(xu��)”�Ľ��O(sh��)˼·�����ǻ۹��S��������������}������Ϣ���cģ�K�������˼�룬�����һ�����N���ڹ��I(y��)�����a(ch��n)�������ڽ̌W(xu��)�����ܳ�ֵ��w�F(xi��n)�W(xu��)�����c�ԡ�����ʹ�̌W(xu��)�c���I(y��)���H�o�p���ӵ����w�F(xi��n)����N���I(y��)��ɫ����������C�Ͻ̌W(xu��)ƽ�_ϵ�y(t��ng)��
��һ�����@�����B(y��ng)��(sh��)�ֻ��������켼�g(sh��)���P(gu��n)��Ӗ(x��n)���c��Ӗ(x��n)ƽ�_���w�F(xi��n)����Ϣ�����a(ch��n)�\���c�����Ԅӻ�˼�롣�������У��O(sh��)Ӌ�����b��PLC���ơ��˙C��������(sh��)�ؼӹ����C���˰��\�����I(y��)�W(w��ng)�j(lu��)��ܛ�������c�_�l(f��)�ȶ���(n��i)�ݣ���һ���^�������Ę˜ʔ�(sh��)�ֻ��Ԅ����a(ch��n)ϵ�y(t��ng)��ͬ�rҲ��һ����(n��i)���S���Ľ̌W(xu��)��(y��ng)��ϵ�y(t��ng)���������w�F(xi��n)��(sh��)�ֻ����Ɍ��ӑ�(y��ng)�ã��Ԅӻ������ܻ��a(ch��n)Ʒ�O(sh��)Ӌ�_�l(f��)�ɷ����(n��i)�ݣ��nj����P(gu��n)�̌W(xu��)�n�̵�����չʾ�cֱ�^�w�F(xi��n)��
(��) ���O(sh��)���c
��ϵ�y(t��ng)���O(sh��)����(j��)��У�̌W(xu��)�wϵ/�n���c�YԴ���Y(ji��)�Ϯ�ǰ�������켼�g(sh��)�����������b���M�м��g(sh��)��ϵ�y(t��ng)���ɣ����Tᘌ���У�̌W(xu��)�������c�аl(f��)��“������������ϵ�y(t��ng)”��ԓϵ�y(t��ng)�ڴ_��ÿ���M�Ɇ�Ԫ��(w��n)���ɿ��Ļ��A(ch��)�ϡ����]���g(sh��)�����M�ԡ������Ժ��I(y��)�����ЙC�Č�������Ԫ�M�ϳɾ���һ����(chu��ng)���ԡ����M�Ժ͌����ԵĔ�(sh��)�ֻ���������ϵ�y(t��ng)��
(��) ���O(sh��)��(n��i)��
��1���ɷ���(w��)�����P(gu��n)�n��
��(sh��)�ؼ��g(sh��)���C���˼��g(sh��)���A(ch��)�c�������Cе������A(ch��)���Cе���̜yԇ���g(sh��)���C늂��ӿ��ơ�Һ���c�≺���ӡ��C���˼��g(sh��)�c��(y��ng)�á��C�һ�w��ϵ�y(t��ng)�O(sh��)Ӌ����(sh��)�ؼ��g(sh��)���C�ϵ�y(t��ng)���桢CAD/CAM��PLCԭ������(y��ng)�á���(sh��)�ֻ����켼�g(sh��)���C��O(sh��)������\�ࡢ���M���켼�g(sh��)�����S��(sh��)�ؼӹ����g(sh��)��̓�M�c���漼�g(sh��)�ȣ����������P(gu��n)�n�̡�
��2���̌W(xu��)��ʾ��Ŀ
���Ի��ӹ�ϵ�y(t��ng)��ʾ���h�̿�����ʾ���C늿ع�һ�w�����g(sh��)��ʾ���Ԅӂ�ݔϵ�y(t��ng)��ʾ�������Ԅ��b����ʾ����(sh��)�ؾ���ʹ�á��C���˾���ʹ�á��a(ch��n)Ʒ�Ԅӂ}��ϵ�y(t��ng)��ʾ�ȵȡ�
��3�����I(y��)�C��Ӗ(x��n)����O(sh��)Ӌ��Ŀ
�Cе���켼�g(sh��)�Ŀ�C��Ӗ(x��n)�����C���z�y�C�ό���(sh��)�ֻ����g(sh��)�Ŀ�C��Ӗ(x��n)�������S��(sh��)�ؼ��g(sh��)�Ŀ�C��Ӗ(x��n)�����C늿��ƾC�ό��C�һ�w��ϵ�y(t��ng)�C���O(sh��)Ӌ���C�һ�w��ϵ�y(t��ng)�C���O(sh��)Ӌ��������ݔ����(y��ng)���O(sh��)Ӌ�������b���Ŀ��(y��ng)���O(sh��)Ӌ�����w�}�쑪(y��ng)���O(sh��)Ӌ���≺ϵ�y(t��ng)��(y��ng)���O(sh��)Ӌ��ϵ�y(t��ng)��늷�����(y��ng)���O(sh��)Ӌ��Ӌ��C�o����ˇҎ(gu��)���O(sh��)Ӌ����(sh��)��(j��)�쑪(y��ng)�ü��_�l(f��)������ϵ�y(t��ng)�đ�(y��ng)���c�_�l(f��)����������(y��ng)���c�x��PLC��(y��ng)�þ����O(sh��)Ӌ��PLC�W(w��ng)��ͨӍ��(y��ng)�á��ŷ��(q��)�ӑ�(y��ng)�á��˙C���澎���O(sh��)Ӌ���h�̽M�B(t��i)ϵ�y(t��ng)�O(sh��)Ӌ�����a(ch��n)����(x��)�����I(y��)����(x��)�����I(y��)�O(sh��)Ӌ�ȵȡ�
���÷�����
| �a(ch��n)Ʒ���Q | �r��Ԫ�� | ��(sh��)�����ף� | ���r��Ԫ�� |
| DBGJS-3 FMS�������a(ch��n)���쌍�ϵ�y(t��ng)�������ͣ� | 2180000 | 1 | 2180000 |
| ��Ӌ:2180000Ԫ �������\�M���b�{(di��o)ԇ | |||
DBGJS-3 FMS�������a(ch��n)���쌍�ϵ�y(t��ng)�������ͣ�
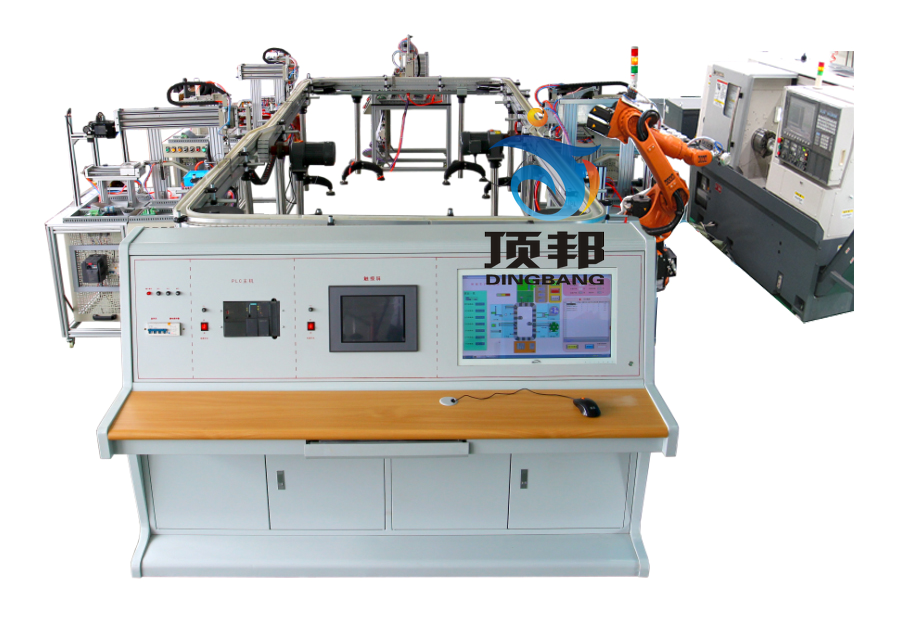
һ���a(ch��n)Ʒ����
1���M��
FMS�������a(ch��n)���쌍�ϵ�y(t��ng)�������ͣ���ʹ���������켼�g(sh��)������д����Ե������Ԅӻ�ϵ�y(t��ng)���Ɍ��F(xi��n)��Ʒ�N����С�����ļӹ��������������켼�g(sh��)�����Ԅӻ����g(sh��)����Ϣ���g(sh��)�����켼�g(sh��)�Ļ��A(ch��)�ϣ���������I(y��)��������Ĺ����O(sh��)Ӌ�����a(ch��n)���켰��(j��ng)�I�������^�̣���Ӌ��C����ܛ����֧���£���(g��u)��һ�����w������I(y��)���������ЙC��ϵ�y(t��ng)���Ԍ��F(xi��n)ȫ�քӑB(t��i)�(y��u)�������w��Ч�桢�����ԣ����M���A�ø���ȫ�ٵ��������켼�g(sh��)�����Ǯ������������Ԅӻ����g(sh��)�l(f��)չ��ǰ�ؿƼ���
���T���I(y��)ԺУ���I(y��)������Ӗ(x��n)�C��(g��u)���Ƶ�FMS�������a(ch��n)���ϵ�y(t��ng)������(j��)�C���Ԅӻ�����M������ИI(y��)����I(y��)�й��I(y��)�����I(y��)�F(xi��n)���O(sh��)���M���្�͝�s����ᘌ����̌W(xu��)����M�Ќ��T�O(sh��)Ӌ���ڙC���⡢늡��⣬������PLC���C���ˡ�����������ӡ����I(y��)���ƾW(w��ng)�j(lu��)��늙C�(q��)���c���ơ�Ӌ��C���T�༼�g(sh��)�I(l��ng)������ϵ�y(t��ng)��MES���a(ch��n)����ϵ�y(t��ng)�Ԅӻ���(y��ng)�õ����c�����������켼�g(sh��)�Ĺ����^���M���о�����MCGS�O(ji��n)��ϵ�y(t��ng)������PLC����λPLCͨ�^�W(w��ng)�j(lu��)ͨӍ���g(sh��)��(g��u)��һ�������Ķ༉Ӌ��C����ϵ�y(t��ng)��ͨ�^Ӗ(x��n)����ʹ�W(xu��)���˽�FMS�Ļ����M�ɺͻ���ԭ�����W(xu��)��ȫ�����ՙC�һ�w�����g(sh��)�đ�(y��ng)���_�l(f��)�ͼ��ɼ��g(sh��)�������W(xu��)����ϵ�y(t��ng)���w�Ƕ�ȥ�J�R��
2������
��������J֪�ͺ;C���͌�Ӗ(x��n)����������_�l(f��)�O(sh��)Ӌ�͌�Ӗ(x��n)��߀�܌��F(xi��n)�W(xu��)���F(xi��n)�����ֲ����;W(w��ng)�j(lu��)Ӌ��Cͬ���^�y�c������Y(ji��)�ϣ����Ӽ�����ȫ����ʾ�����a(ch��n)������ϵ�y(t��ng)��(y��ng)����ȫ�Ԅӿ��ƹ��ܣ��ܳ��չʾ�F(xi��n)�����I(y��)���M�Д�(sh��)�ֻ��������a(ch��n)�ĸ����h(hu��n)��(ji��)��ϵ�y(t��ng)��(y��ng)���ІΙC�������ơ������\�й��ܣ�ϵ�y(t��ng)��(y��ng)���І�ͣ���ơ��ӑB(t��i)���I(y��)Ӌ���{(di��o)�ȡ�����YԴ�ӑB(t��i)�@ʾ��ϵ�y(t��ng)�����\���c̎��������λ�ÄӑB(t��i)�@ʾ�ȵȹ��ܡ�
ԓϵ�y(t��ng)���ܷ���(w��)�ڹ���Ӗ(x��n)�����`�̌W(xu��)�h(hu��n)��(ji��)�⣬߀��(y��ng)�ܸ��w���P(gu��n)�n�̣������M�����P(gu��n)�Č��`�Խ̌W(xu��)�h(hu��n)��(ji��)�����w���£�
��1���ɷ���(w��)�����P(gu��n)�n��
��(sh��)�ؼ��g(sh��)���C���˼��g(sh��)���A(ch��)�c�������Cе������A(ch��)���Cе���̜yԇ���g(sh��)���C늂��ӿ��ơ�Һ���c�≺���ӡ��C���˼��g(sh��)�c��(y��ng)�á��C�һ�w��ϵ�y(t��ng)�O(sh��)Ӌ����(sh��)�ؼ��g(sh��)���C�ϵ�y(t��ng)���桢CAD/CAM��PLCԭ������(y��ng)�á���(sh��)�ֻ����켼�g(sh��)���C��O(sh��)������\�ࡢ���M���켼�g(sh��)�����S��(sh��)�ؼӹ����g(sh��)��̓�M�c���漼�g(sh��)�ȣ����������P(gu��n)�n�̡�
��2���̌W(xu��)��ʾ��Ŀ
���Ի��ӹ�ϵ�y(t��ng)��ʾ���h�̿�����ʾ���C늿ع�һ�w�����g(sh��)��ʾ���Ԅӂ�ݔϵ�y(t��ng)��ʾ�������Ԅ��b����ʾ����(sh��)�ؾ���ʹ�á��C���˾���ʹ�á��a(ch��n)Ʒ�Ԅӂ}��ϵ�y(t��ng)��ʾ�ȵȡ�
��3�����I(y��)�C��Ӗ(x��n)����O(sh��)Ӌ��Ŀ
�Cе���켼�g(sh��)�Ŀ�C��Ӗ(x��n)�����C���z�y�C�ό���(sh��)�ֻ����g(sh��)�Ŀ�C��Ӗ(x��n)�������S��(sh��)�ؼ��g(sh��)�Ŀ�C��Ӗ(x��n)�����C늿��ƾC�ό��C�һ�w��ϵ�y(t��ng)�C���O(sh��)Ӌ���C�һ�w��ϵ�y(t��ng)�C���O(sh��)Ӌ��������ݔ����(y��ng)���O(sh��)Ӌ�������b���Ŀ��(y��ng)���O(sh��)Ӌ�����w�}�쑪(y��ng)���O(sh��)Ӌ���≺ϵ�y(t��ng)��(y��ng)���O(sh��)Ӌ��ϵ�y(t��ng)��늷�����(y��ng)���O(sh��)Ӌ��Ӌ��C�o����ˇҎ(gu��)���O(sh��)Ӌ����(sh��)��(j��)�쑪(y��ng)�ü��_�l(f��)������ϵ�y(t��ng)�đ�(y��ng)���c�_�l(f��)����������(y��ng)���c�x��PLC��(y��ng)�þ����O(sh��)Ӌ��PLC�W(w��ng)��ͨӍ��(y��ng)�á��ŷ��(q��)�ӑ�(y��ng)�á��˙C���澎���O(sh��)Ӌ���h�̽M�B(t��i)ϵ�y(t��ng)�O(sh��)Ӌ�����a(ch��n)����(x��)�����I(y��)����(x��)�����I(y��)�O(sh��)Ӌ�ȵȡ�
�������g(sh��)����
1. ݔ���Դ������������220V±10% 50Hz
2. �����h(hu��n)�����ض�-10�桫+40�� �������≤85%��25�棩 ���Σ�4000m
3. �b����������2.5kVA
4. ���γߴ磺7000mm×5500mm×2400mm
5. ��ȫ���o������©늱��o����ȫ���χ��Ҙ˜�
������Ӗ(x��n)��(n��i)��
1��PLC���O(sh��)Ӌ�c��(y��ng)��
(1) ��(sh��)��(j��)��ݔ���܌�Ӗ(x��n)
(2) ���r��Ӌ��(sh��)����λ���܌�Ӗ(x��n)
(3) ���^���܌�Ӗ(x��n)
(4) ���M���ܵđ�(y��ng)�Ì�Ӗ(x��n)
(5) ���D(zhu��n)���ܵđ�(y��ng)�Ì�Ӗ(x��n)
(6) �ӳ����{(di��o)�ù��ܵđ�(y��ng)�Ì�Ӗ(x��n)
(7) �Д���ƹ��ܵđ�(y��ng)�Ì�Ӗ(x��n)
(8) ׃�l�{(di��o)�ٵ�PWM���ƹ��ܵđ�(y��ng)�Ì�Ӗ(x��n)
(9) �ŷ�늙C�ٶ�λ�ÿ��ƹ��ܵđ�(y��ng)�Ì�Ӗ(x��n)
(10) �z�yϵ�y(t��ng)�ij����O(sh��)Ӌ
(11) ׃�l�{(di��o)�٭h(hu��n)���Ԅӂ�ݔϵ�y(t��ng)�ij����O(sh��)Ӌ
(12) �ԄӃ���ϵ�y(t��ng)�ij����O(sh��)Ӌ
2�����������g(sh��)����(y��ng)��
(1) ��늂������������о�����(y��ng)��
(2) 늸Ђ������������о�����(y��ng)��
(3) 늴ł������������о�����(y��ng)��
(4) λ�Â������������о�����(y��ng)��
3����ӿ��Ƽ��g(sh��)
(1) 늿ؚ���y�Ĺ���ԭ������(y��ng)��
(2) ��հl(f��)�����Ĺ���ԭ������(y��ng)��
(3) ��Ӷ�(li��n)�w�Ĺ���ԭ������(y��ng)��
(4) ���N��Ĺ���ԭ������(y��ng)��
4���\�ӿ���ϵ�y(t��ng)
(1) �ŷ�늙C��λ�Ŀ��Ƽ��g(sh��)
(2) ֱ��늙C�Ŀ��Ƽ��g(sh��)
(3) ����늙C��׃�l�{(di��o)�ټ��g(sh��)
(4) ���M늙C�Ķ�λ���Ƽ��g(sh��)
5���M�B(t��i)�O(ji��n)�ؼ��˙C���漼�g(sh��)
(1) �M�B(t��i)�O(ji��n)��ܛ���Ļ�����(y��ng)��
(2) �M�B(t��i)�O(ji��n)��ܛ��ͨ�ő�(y��ng)�Ì�Ӗ(x��n)
6���Cе�Y(ji��)��(g��u)Ӗ(x��n)�����g(sh��)
(1) ͬ�������әC��(g��u)���O(sh��)Ӌ�������о�
(2) ֱ�X݆���әC��(g��u)���O(sh��)Ӌ�������о�
(3) �F�X݆���әC��(g��u)���O(sh��)Ӌ�������о�
(4) ֱ����(d��o)܉���O(sh��)Ӌ�������о�
(5) �L��z�U�����������(y��ng)��
7�����ϙz�y���g(sh��)������Ӗ(x��n)
(1) ��������O(sh��)�õ��ų�Ӗ(x��n)��
(2) ����(sh��)�����O(sh��)�õ��ų�Ӗ(x��n)��
(3) 늚�Ӿ������O(sh��)�õ��ų�Ӗ(x��n)��
(4) �Cе�����O(sh��)�õ��ų�Ӗ(x��n)��
8���W(w��ng)�j(lu��)ͨӍ���g(sh��)��PROFIBUS�������g(sh��)
(1) �W(w��ng)�j(lu��)ͨӍ���A(ch��)��ԭ���c��(y��ng)��
(2) PROFIBUS-DPģ�K���о��c��(y��ng)��
(3) PROFIBUSͨӍ�f(xi��)�h���о��c��(y��ng)��
(4) PROFIBUS��վ�c��վ֮�g��ͨӍ�о�
9�����I(y��)�C���ˌ�Ӗ(x��n)
(1) ���I(y��)�C����ʾ�̆�Ԫʹ��
(2) ���I(y��)�C���˻���ָ������cλ���c�O(sh��)��
(3) ���I(y��)�C����ܛ��ʹ��
(4) ���I(y��)�C���˹����ĸ�ۙץȡ
(5) ���I(y��)�C���˳�Ʒ�M�b�c���
10����(sh��)��ϵ�y(t��ng)��Ӗ(x��n)
(1) ��(sh��)��ϵ�y(t��ng)��ʹ�ò���
(2) ��(sh��)�ؾ���
(3) ��(sh��)��ϵ�y(t��ng)���{(di��o)ԇ
�ġ�ϵ�y(t��ng)�M��
1��ϵ�y(t��ng)��Ӳ���ɾł�������Ԫվ�M��
��һ������ƽ�_
����ƽ�_��Ҫ�Ɇ���늾W(w��ng)늉�ָʾ���Դ���Ʋ��֡��������C����B(t��i)ָʾ����10Ӣ�繤�I(y��)��ɫ�|��������X�ȽM�ɣ���Ҫ��ɱO(ji��n)ҕ����վ�Ĺ�����B(t��i)���f(xi��)�{(di��o)��վ�\�У���ɹ��I(y��)���ƾW(w��ng)�j(lu��)�ļ��ɡ�
������1�����φ�Ԫ
���φ�Ԫ��Ҫ���϶������D(zhu��n)�_��������(d��o)�ϙC��(g��u)��ֱ���p��늙C������_�P(gu��n)�ȽM�ɡ���Ҫ��Ɍ������Ļ������_�����͵����\��λ��
2�����\��Ԫ
�əCе�֡��Ƅӻ��_�����b�����_�����I(y��)��(d��o)܉���X݆�X�l�����؉K�ȽM�ɣ���Ҫ��Ɍ������İ��\��
(��)1�� 6���ɶȹ��I(y��)�C���ˆ�Ԫ
��6���ɶȹ��I(y��)�C���ˡ�ץȡ�C��(g��u)����צ�ȽM�ɣ���Ҫ��Ɍ���������ȡ�����\���b��
2���ӹ�����
��(sh��)�ؼӹ������_��BT40���S��Ԫ��8000�D(zhu��n)������12�ѵ��죬��h�A���ŷ���(sh��)��ϵ�y(t��ng)���S��Ҏ(gu��)����λ����0.005mmȫ���o�O(sh��)Ӌ�����^������3.7kw�ŷ����S���Ʉ��Թ��z��
(��) 1�����\��Ԫ
�ɟo�U��ס�������ס��Cе��צ���U���_�ȽM�ɣ���Ҫ��Ɍ������İ��\�֒���
2���D���Π�z�y��Ԫ
�D��̎���Ԫ��Ҫ�ɹ�Դ���R�^��CCD�����C���D��̎�����������@ʾ���ȽM�ɡ���Ҫ�z�y�ӹ���ɺ����^�Π�Ʒ�|(zh��)�Ƿ�ϸ�ͨ�^�z���^�@ȡ�����ĈD���ɈD��̎������ɹ����ϸ��c����Д࣬�����ϸ�����
���ģ� 1�����b��Ԫ
����Ͳ���Q�ϙC��(g��u)�����ϙC��(g��u)�ȽM�ɣ���Ҫ��Ɍ��ɷN��ͬ���������ϼ����b��
2�����\��Ԫ
�ɟo�U��ס�������ס��Cе��צ���U���_�ȽM�ɣ���Ҫ��Ɍ������İ��\�֒���
(��) 1�������ֆ�Ԫ
�əCе�֡��M�ۡ����D(zhu��n)�_���Cе��צ���ȽM�ɣ���Ҫ��Ɍ������İ��\��
2����惦��Ԫ
�ɲ��M늙C���L��z�U�����w�졢���Ϛ�ס�늴��y�ȽM�ɡ���Ҫ��Ɍ���Ʒ������惦��
�������h(hu��n)���Ԅ�ݔ�;�
�h(hu��n)���Ԅ�ݔ�;���Ҫ���X�Ͻ��ͲĻ��w���h(hu��n)�Ђ�ݔ�����Ԅӌ�(d��o)��C��(g��u)��׃�l�{(di��o)��ϵ�y(t��ng)���ԄӶ�λ�C��(g��u)�ȽM�ɡ�����Ɍ������ڲ�ͬ�ٶ��µ�ݔ�ͣ���ͬ��λ���ԄӶ�λ���Ķ����������Ԅӭh(hu��n)��ݔ���Ĺ���Ч�ʡ�
���ߣ�����ϵ�y(t��ng)
����ϵ�y(t��ng)��վ�������T��S7-300����վ�������T��S7-200SMART����վ֮�gʹ��ProfiBus-DP�����M��ͨӍ��S7-200 SMART��վ��Ҫ���ڿ����c�(q��)���O(sh��)��ӣ������F(xi��n)����������̖�M�вɼ���S7-300��վ�ɼ�����վ��(sh��)��(j��)���f(xi��)�{(di��o)��վ�\�У�������λ�C�ıO(ji��n)�س����ṩ��(sh��)��(j��)��ͬ�rϵ�y(t��ng)߀���й��I(y��)��̫�W(w��ng)ͨ��ģ�K��10Ӣ���ɫ���I(y��)�|���������|������S7-300���C����X�g�M������̫�W(w��ng)�j(lu��)���������ϵ�y(t��ng)���ƾW(w��ng)�j(lu��)�ļ��ɡ�